حلول الأسئلة
السؤال
صل اللبنات البرمجية بوظيفتها الصحيحة:
الحل
| (١) الموضع x | (٤) تحديد الاتجاه المواجه لنظام الدفع باستخدام وضع الزاوية الحالي لمستشعر الجيرسكوب |
| (٢) دوران القيادة بالدرجات | (١) تحديد موضع إحداثيات x و y للروبوت الافتراضي بالمليمتر أو بالبورصة |
| (٣) زاوية الموضع بالدرجات | (٣) تحديد الاتجاه الحالي الذي يواجهه الروبوت الافتراضي بالدرجات |
| (٤) اتجاه المواجهة لنظام القيادة بالدرجات | (٢) تحديد زاوية انعطاف نظام الدفع عند ضبطها بواسطة مستشعر الانعطاف |
مشاركة الحل
الدرس الثالث: الحركة التلقائية
.JPG)
تدريب ١:
ما مستشعر الجيرسكوب؟ وكيف يمكن استخدامه للتحكم في حركة الروبوت؟
يوجد مستشعر الجيرسكوب في الجزء الخلفي من الروبوت، يتم تحديد موضع الروبوت الافتراضي وفق مركزه للانعطاف، وهو أيضاً موقع قلم الروبوت.
يستخدم مستشعر الجيرسكوب في الملاحة، فمن خلال قياس السرعة والطريقة التي ينعطف بها الروبوت، يمكنه تحديد اتجاه انعطاف الروبوت.
يمكن مستشعر الجيرسكوب الروبوت من القيادة بشكل مستقيم والانعطاف بصورة صحيحة.
لاحظ أن مستشعر الجيرسكوب يمكنه اكتشاف ما إذا كانت الحركة في اتجاه عقارب الساعة أو عكس اتجاه عقارب الساعة بالإضافة إلى تحديد تغير موقع الروبوت أثناء تحركه في ساحة اللعب.
تدريب ٢:
صل اللبنات البرمجية بوظيفتها الصحيحة:
| (١) الموضع x | (٤) تحديد الاتجاه المواجه لنظام الدفع باستخدام وضع الزاوية الحالي لمستشعر الجيرسكوب |
| (٢) دوران القيادة بالدرجات | (١) تحديد موضع إحداثيات x و y للروبوت الافتراضي بالمليمتر أو بالبورصة |
| (٣) زاوية الموضع بالدرجات | (٣) تحديد الاتجاه الحالي الذي يواجهه الروبوت الافتراضي بالدرجات |
| (٤) اتجاه المواجهة لنظام القيادة بالدرجات | (٢) تحديد زاوية انعطاف نظام الدفع عند ضبطها بواسطة مستشعر الانعطاف |
تدريب ٣:
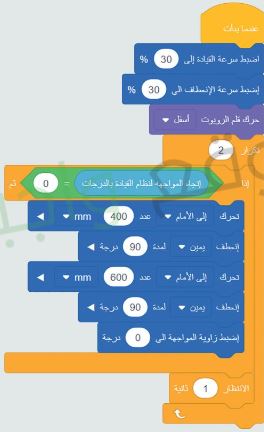
أنشئ برنامجاً لجعل الروبوت الافتراضي يرسم مستطيلاً في ملعب فن القماش.
ملاحظة: أوضاع المستطيل المتقابلة متساوية.
تدريب ٤:
استخدم ساحة لعب شبكة خريطة وأنشئ برنامجاً يبدأ به الروبوت الحركة من النقطة (900- :x مليمتر و900-:y مليمتر) وينتهي في منتصف هذه الساحة.
استخدم لبنات الموضع ( ) بالمليمتر للحركة، وزاوية الموضع بالدرجات للانعطاف.
